



最新下载
热门教程
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
SolidWorks如何制作棘轮棘爪运动仿真
时间:2022-06-28 21:55:32 编辑:袖梨 来源:一聚教程网
棘轮机构是摇杆的连续往复摆动转换成棘轮的单向间歇运动的机构。这里分享一种省略了摇杆的solidworks棘轮棘爪运动仿真的方法,仿真时用马达带动棘轮单向连续转动代替了摇杆带动棘轮单向间歇运动。
一、进行装配
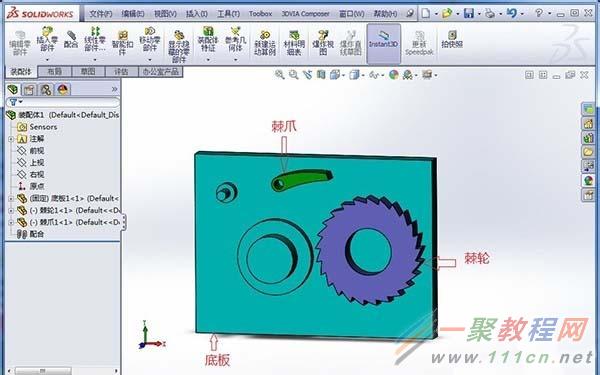
1、零件准备,如下图所示,主要有底板、棘轮和棘爪,底板用于确定棘轮和棘爪的相对位置。
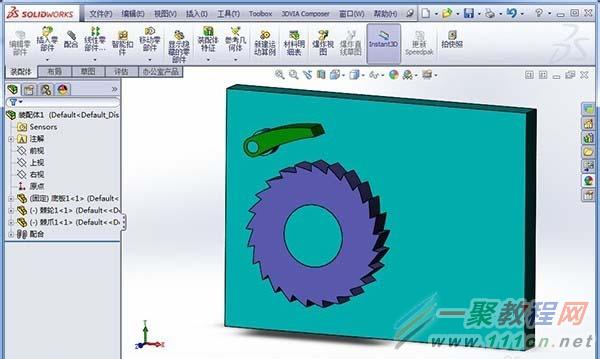
2、将底板作为固定件,把棘轮和棘爪分别安装在底板的相应位置,同时保持二者的旋转自由度。装配效果如下图所示:
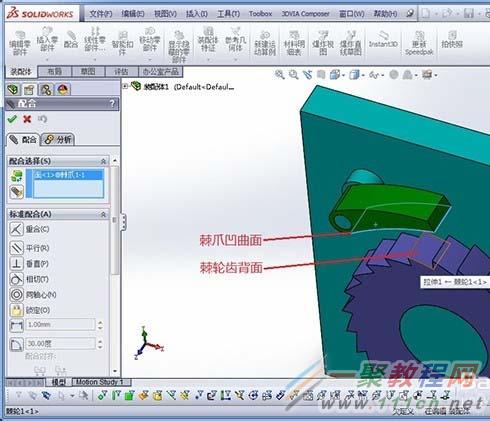
3、如下图所示,选择棘爪凹曲面和棘轮齿背面作为要配合的实体,系统自动将二者的配合关系选择为“同心”。这一步保证棘轮棘爪之间有个合适的初始相对位置。此时所有零件都处于完全定位状态。
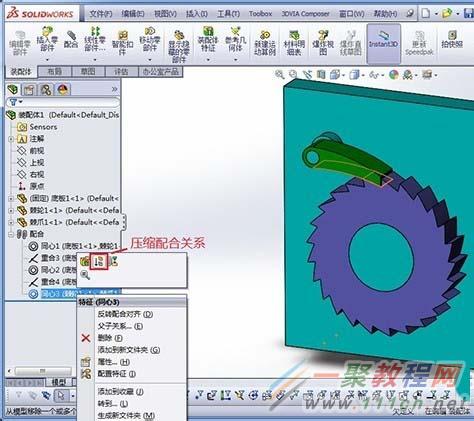
4、如下图所示,将第三步设置的配合关系压缩,释放棘轮和棘爪的旋转自由度,为运动仿真做准备。
二、运动仿真
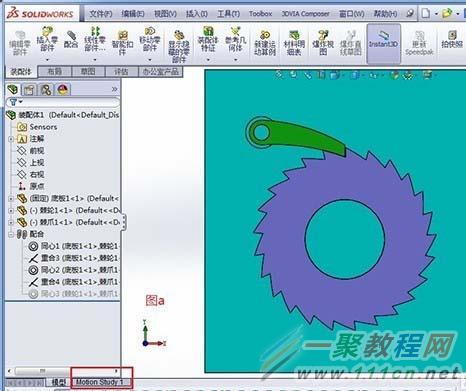
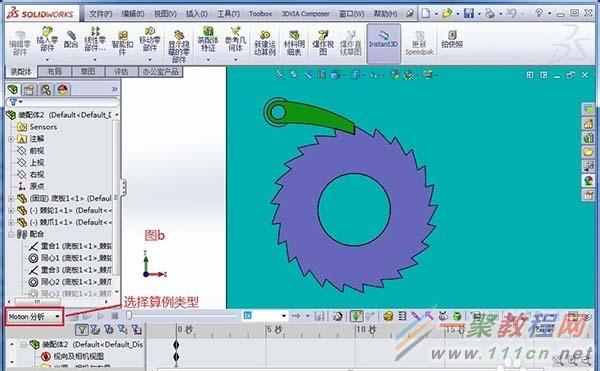
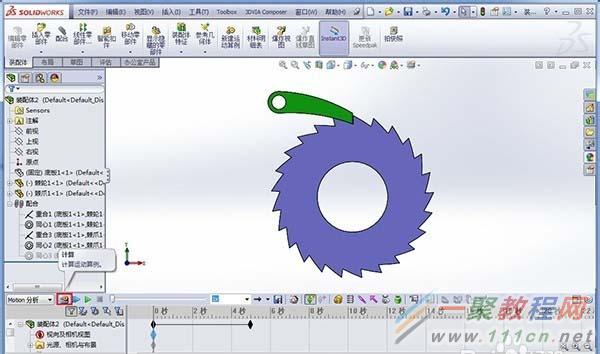
1、在已经开启SolidWorks Motion插件的情况下,如下图a所示点击“Motion Study1”。在“算例类型”一栏选择“Motion分析”,如下图b所示:
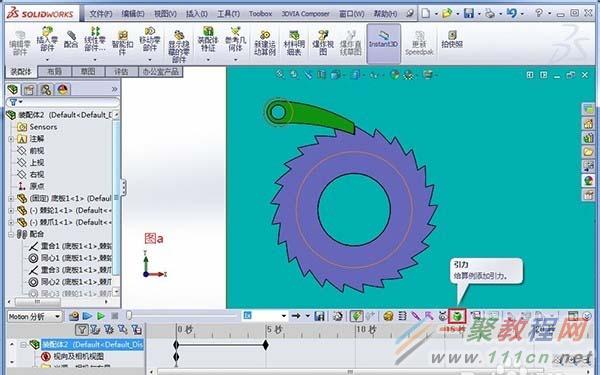
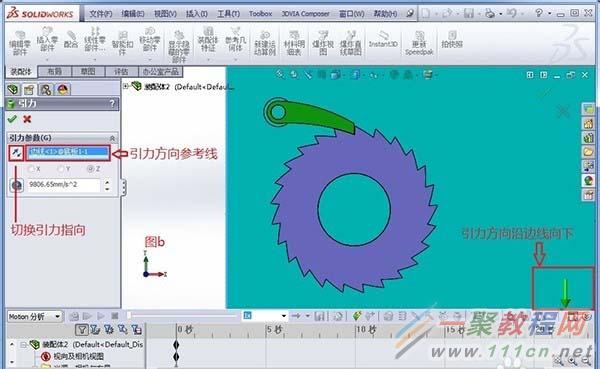
2、点击如下图a所示的青苹果图标,为装配环境添加引力;如下图b所示,将底板的一条竖直边线设置成引力方向的参考线,将引力方向切换到竖直向下。
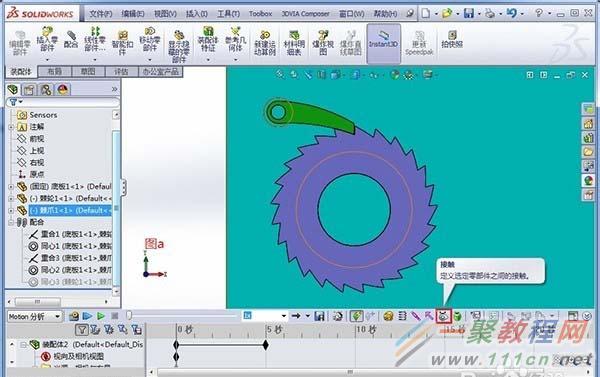
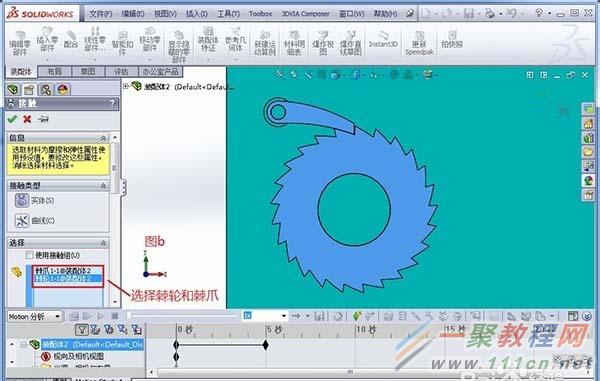
3、点击如下图a所示的凸轮图标,在棘轮与棘爪之间设置接触关系;如下图b所示,选中棘轮和棘爪,点击确定即可。
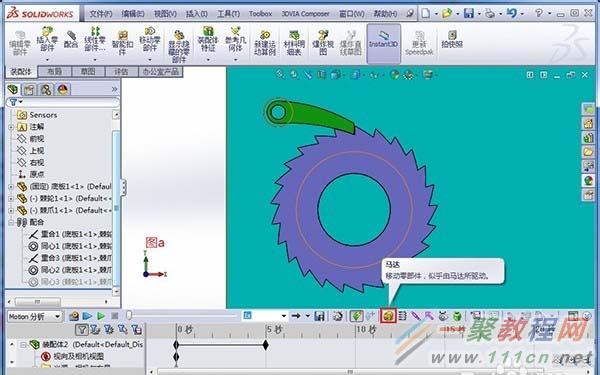
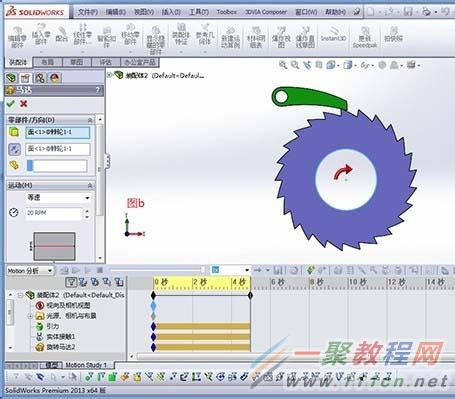
4、点击如下图a所示的电机图标,在棘轮上放置一个旋转马达;如下图b所示,旋转马达放置在棘轮上并且按顺时针方向旋转,转速最好设置得小一点。
5、将底板隐藏,方便观察棘轮与棘爪的相对运动,然后替换“视向及相机位置”的初始键码,以让系统记住底板的隐藏操作。
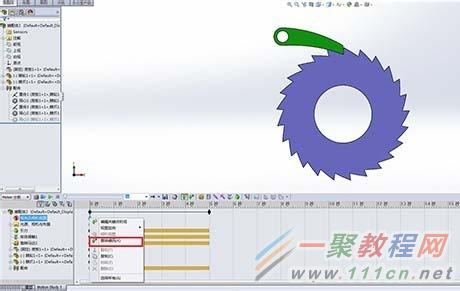
6、点击如下图中的“计算”,在运动算例计算完后,就可以播放仿真动画了。
7、简化的solidworks棘轮棘爪运动仿真效果如下:
相关文章
- 王者荣耀世界零氪玩家如何生存 07-28
- 快手极速版怎么绑定手机号 07-28
- 明日方舟和轻松小熊联动活动内容一览 07-28
- 逆战未来黎明之光 逆战未来黎明之光玩法机制与新手入门指南 07-28
- 植物大战僵尸融合版毁灭土豆地雷介绍 07-28
- 逆战未来飓风之龙 逆战未来飓风之龙武器获取方法详解 07-28